智能矿山巡检机器人
项目内容:整合创新设计+外观造型设计+装配结构设计+3D打印/CNC机加工样机制作 Integration of innovative design+appearance design + assembly structure design
一诺设计助力企业获取由设计带来的商业价值!
Enor design boost the enterprise to obtain the commercial value brought by the design!
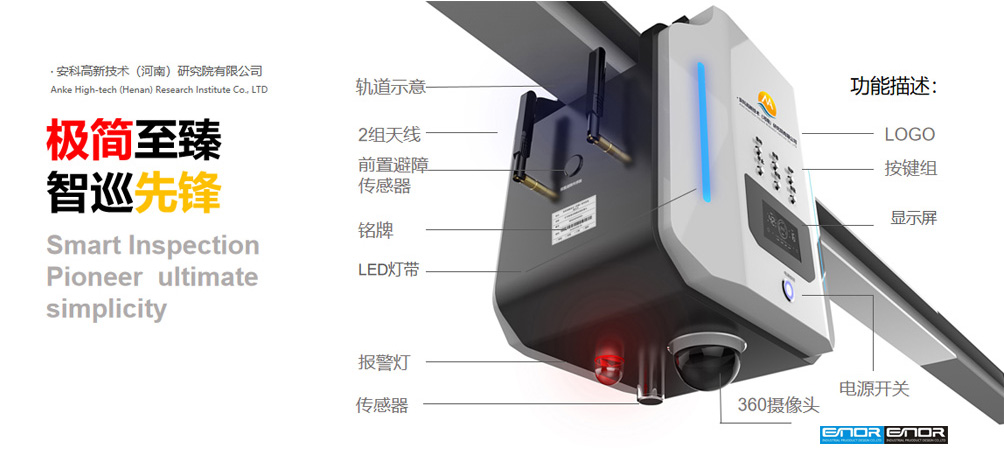
智能矿山巡检机器人
Intelligent mine inspection robot
项目内容:
整合创新设计+外观造型设计+装配结构设计+3D打印/CNC机加工样机制作
Integration of innovative design+appearance design + assembly structure design
设计周期:25个工作日
多模态感知融合:
机器人搭载多传感器融合系统,包括激光雷达、高清相机、深度相机、轮式里程计、惯性传感器IMU和超宽带UWB探测仪等,实现了对井下环境的全方位感知。
自主导航与定位技术突破
SLAM技术应用:基于激光雷达与视觉SLAM技术,矿山巡检机器人实现了在井下无GPS环境中的厘米级定位精度,适应坡度≤35°的复杂巷道环境。
通过改进的YOLOv11和SLAM算法,实现了高精度的视觉感知和导航能力。
多传感器融合与智能诊断
5G通信与远程控制创新
模块化与轻量化设计创新
智能决策与预警系统
环境适应性创新
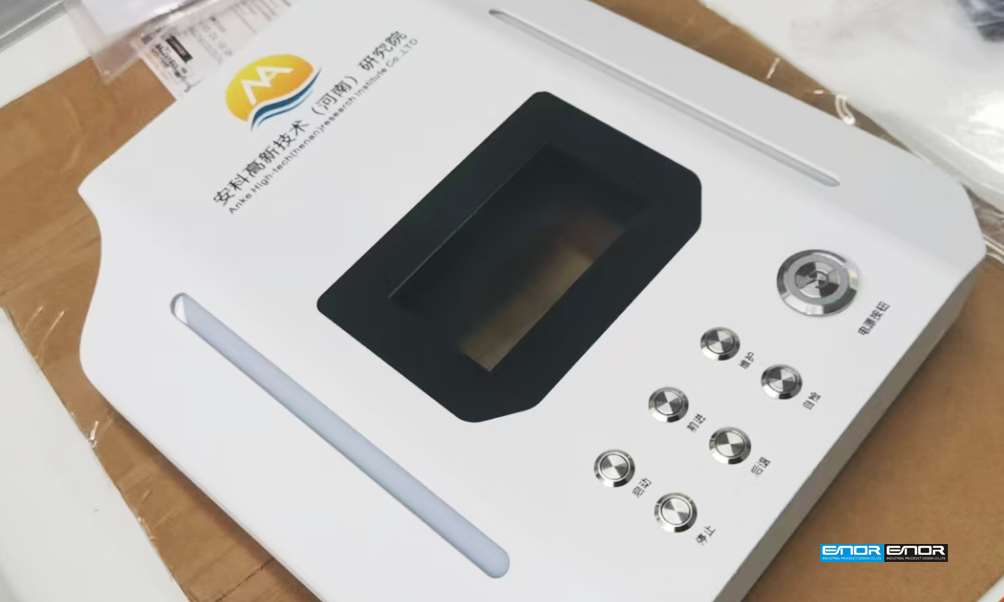
--整体设计方案展示--




--手板模型制作装配结构安装测试验证--
材料:主体结构钢板激光切割焊接、打磨、喷塑、附件LED灯带亚克力材质、丝印等----